Spritzguss-Automation
Gefertigt, geprüft und verpackt
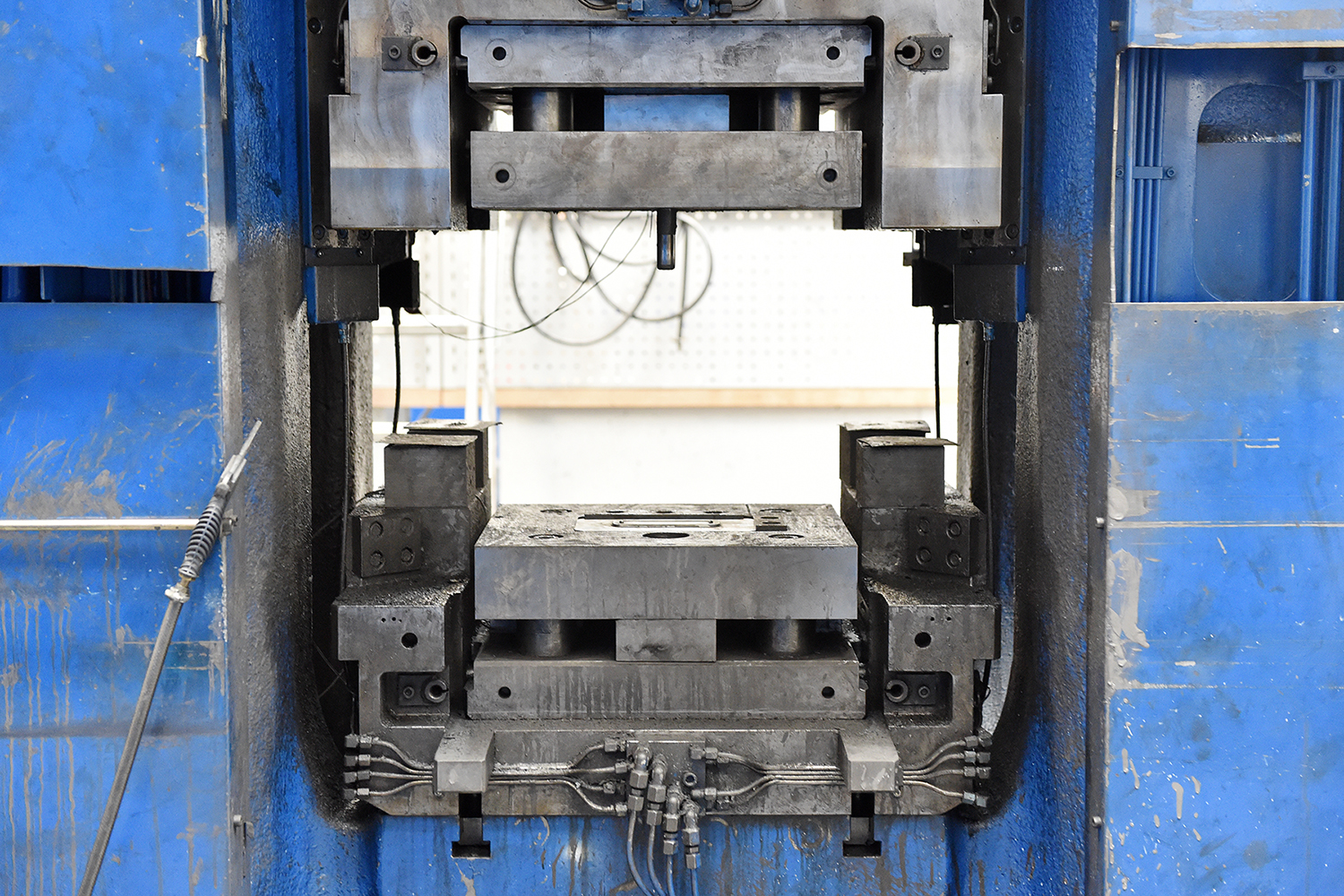
Mit fast 100 Kunststoff-Spritzgießmaschinen im Schließkraftbereich von 15 bis 280 Tonnen fertigen bei der Weißer + Grießhaber GmbH rund 270 Mitarbeiter mehr als 700 Millionen Kunststoffteile im Jahr. Die technisch anspruchsvollen Kunststoffteile werden als Einzelteile oder Baugruppen meist hochautomatisiert in großen Stückzahlen produziert.

Ein typisches Beispiel dafür ist die nachfolgend beschriebene Anlage zur Herstellung und Prüfung eines hochpräzisen Hybridbauteils für die Gebäudetechnologie. Die Anlage wurde von der EGS Automatisierungstechnik GmbH im Jahr 2009 errichtet. Seitdem produziert sie zuverlässig im Dreischichtbetrieb an fünf bis sieben Tagen in der Woche. In der Anlage werden die Werkstücke automatisiert gefertigt, geprüft und in kundeneigene Werkstückträger verpackt. Drei Roboter sorgen für einen verlässlichen und präzisen Fertigungsablauf. Die Werkstücke werden in einer Arburg-Spritzgießmaschine mit 250 Tonnen Schließkraft gespritzt. Die Roboterfamilie besteht aus einem Sechs-Achs-Roboter von Yaskawa, dem Motoman HP20 mit 20 Kilogramm Traglast und rund 1.700 Millimetern Reichweite sowie zwei vierachsigen Scara-Robotern mit 850 Millimetern Reichweite, ebenfalls von Yaskawa. Dies gewährleistet eine einheitliche Bedien- und Programmieroberfläche über die unterschiedlichen Kinematiken hinweg. Die neunte Ausgabe von Rockwell Automations „State of Smart Manufacturing“ Report liefert Einblicke in Trends und Herausforderungen für Hersteller. Dazu wurden über 1.500 Fertigungsunternehmen befragt, knapp 100 der befragten Unternehmen kommen aus Deutschland. ‣ weiterlesen
KI in Fertigungsbranche vorn
Prüfung auf Rundtakttisch
Die Prüfungen der relevanten Eigenschaften erfolgen auf einem Rundtakttisch. Die geprüften Fertigteile werden in Werkstückträgern verpackt, die in einem speziellen Palettiersystem bevorratet und gestapelt werden. Vervollständigt wird die Anlage durch eine Stanze, in der die einzulegenden Kontakte mit einem aus Schüttgut bereitgestellten Kunststoffclip verpresst und positioniert bereitgestellt werden. In der Stanze werden die zu umspritzenden Kontakte vom Coil abgewickelt, aus dem Band ausgestanzt und danach mit einem Kunststoffclip verpresst, der mittels eines Vibrationswendelförderers zugeführt und positioniert wird. Der Clip sorgt für eine definierte und konstante Lage der Kontakte zueinander. Diese Baugruppe wird am Auslauf der Stanzeinheit positioniert bereitgestellt und vom ersten Scara-Roboter (Roboter 1) entnommen. Da die Bauteile in einem Spritzgießwerkzeug mit vier Kavitäten gefertigt werden, legt dieser Roboter die Unterbaugruppen im Nestabstand der Kavitäten in einer Übergabestation exakt positioniert ab. Von dort werden die Einlegeteile vierfach vom Sechs-Achs-Roboter (Roboter 2) entnommen, der damit zur Spritzgießmaschine (SGM) fährt und auf das Öffnen des Werkzeuges wartet. Die Einlegeteile werden dabei sicher und präzise auf einer Funktionsseite des speziellen Doppel-vierfach-Greifwerkzeuges aufgenommen. Die richtige Lage und das Vorhandensein werden sensorisch abgefragt und sichergestellt.
Beschädigung wird vermieden
Nach Beendigung des Spritzzyklus der SGM und Öffnung des Werkzeuges fährt der Roboter in die Form und entnimmt mit der zweiten Funktionsseite des Robotergreifwerkzeuges die vier Fertigteile aus der Auswerferseite des Werkzeuges. Die Entnahme wird durch entsprechende Sensoren im Greifwerkzeug sichergestellt, um Beschädigungen am Spritzgießwerkzeug sicher zu vermeiden. Danach legt der Roboter die Einlegeteile düsenseitig in das Werkzeug ein und fährt wieder aus der Maschine heraus. Dieser Vorgang muss einerseits hochpräzise erfolgen, um die Qualität der Werkstücke zu gewährleisten, andererseits schnellstmöglich ablaufen, um die ‘Werkzeugoffen-Zeit’ so gering wie möglich zu halten und die Maschine bestmöglich auszulasten. Roboter 2 legt nun das entnommene Werkstückquartett in eine zweite Vierfach-Übergabestation ab. Jetzt kommt der zweite Scara-Roboter (Roboter 3) zum Zug. Er übernimmt die fertigen Werkstücke einzeln aus der Übergabestation und setzt sie auf den Rundtakttisch ab. Auf diesem Rundtakttisch werden nacheinander folgende Prüfungen durchgeführt: Zunächst prüft ein Bildverarbeitungssystem das Vorhandensein der Kontakte, sowie mehrerer Freisparungen, die für die spätere einwandfreie Montage des Werkstückes beim Kunden von essenzieller Bedeutung sind. Nachfolgend wird in der nächsten Station des Rundtakttisches mittels eines Multi-Messtasters die Länge der freistehenden Kontakte in Bezug zu einer Referenzkante geprüft. Im nächsten Takt des Drehtisches erfolgt eine Hochspannungs- und Durchgangsprüfung, die sicherstellt, dass einerseits alle Pins vorhanden sind und gleichzeitig die einzelnen Kontakte im Kunststoffwerkstück ausreichend gegeneinander isoliert sind und kein Kurzschluss besteht oder entstehen kann. Nach einer Reservestation des Rundtakttisches, an der bei Bedarf zu einem späteren Zeitpunkt weitere Prüfungen implementiert werden können, werden die Werkstücke, die alle Prüfungen bestanden haben als ‘in Ordnung’ markiert. Nachfolgend entnimmt Roboter 3 die Fertigteile vom Rundtakttisch. Werkstücke die eine der vorgenannten Prüfungen nicht bestanden haben werden über eine Ausschuss-Rutsche verlässlich ausgeschleust. Der Thin[gk]athon, veranstaltet vom Smart Systems Hub, vereint kollaborative Intelligenz und Industrie-Expertise, um in einem dreitägigen Hackathon innovative Lösungsansätze für komplexe Fragestellungen zu generieren. ‣ weiterlesen
Innovationstreiber Thin[gk]athon: Kollaborative Intelligenz trifft auf Industrie-Expertise
Der Roboter verpackt
Die fertigen Bauteile werden vom Roboter 3 nun in die kundeneigenen Werkstückverpackungen abgelegt. Die Handhabung dieser Werkstücktrays aus dem Palettiersystem und zurück dorthin ist eine Zusatzaufgabe von Roboter 2, die er mit eines Traygreifwerkzeuges, welches stirnseitig am Doppel-vierfachgreifer montiert ist, zwischendurch erledigt. Er nimmt leere Trays aus dem Palettiersystem, stellt sie Roboter 3 zum Befüllen auf einer Station bereit und stellt die fertig befüllten Werkstückträger auf dem Fertigteilstapel des Palettiersystems ab. Die sichere und zuverlässige Bereitstellung und Vereinzelung der wiederverwendbaren Kundentransportverpackungen ist wegen deren Labilität eine herausfordernde Aufgabe. Der Anlagenbediener stellt diese in Stapeln zu 16 Trays in den Palettierer, jeder Werkstückträger fasst dabei 16 Teile, das Palettiersystem puffert fünf dieser Stapel und bietet so eine sehr große Werkstückautonomie. Die zuverlässige und problemarme Anlage erfordert daher nur wenig Personaleinsatz und fertigt vollautomatisch und zuverlässig seit ihrer Installation 2009 hochpräzise Kunststoffhybridteile, ganz nach dem Unternehmensmotto ‘Exzellenz in Kunststoff’. Heiko Schwer, bei Weißer + Grießhaber verantwortlich für den Bereich Großanlagen, ist zufrieden: „Um die hohen Qualitätsanforderungen und Erwartungen an Liefertreue und -pünktlichkeit zu erfüllen, benötigen wir genau solche Fertigungsanlagen. Die Anlage arbeitet seit ihrer Installation zuverlässig und akkurat. Erstaunlich ist dabei der niedrige Wartungsaufwand für die Roboter, die seitdem im Drei-Schicht-Betrieb im Einsatz sind. Das spart einerseits Kosten und die geringen Stillstandszeiten gewährleisten uns darüber hinaus eine sehr hohe Produktivität.“